Le convertisseur C.A à C.C nous donne, à partir d’une source de tension alternative
monophasée ou polyphasée, une tension continue quipeut être fixe ou variable (Figure 1).
FIGURE 1 CONVERTISSEUR ALTERNATIF-CONTINU
1. Le redresseur à tension fixe en commutation naturelle à base de diodes
1.1. Le redresseur fixe monophasé
Le redresseur fixe ou non commandé contient seulement des diodes produisant ainsi
une tension continue fixe à sa sortie.
On retrouve deux types de redresseurs monophasés, soit:
A) le redresseur simple alternance ou demi-onde;
B) le redresseur double alternance ou pleine-onde.
A) Le redresseur simple alternance
Le redresseur simple alternance est composé d’une seule diode ( Figure 2) et la tension
moyenne à la charge nous est donnée par l’équation 2.1 : D
FIGURE 2 REDRESSEUR MONOPHASÉ SIMPLE ALTERNANCE
Vo moy = Emax /π
B) Le redresseur double alternance en pont
Ce redresseur est réalisé à partir de quatre diodes montés en pont (Figure 3) et la tension
moyenne à la charge est donnée par l’équation 2.2 :
FIGURE 3 REDRESSEUR MONOPHASÉ DOUBLE ALTERNANCE
Vo moy = 2Emax/π
1.2. Le redresseur fixe triphasé
Le redresseur monophasé est limité à des puissances pouvant atteindre 10Kw. Pour
alimenter des puissamces supérieures à cette valeur, on utilise des redresseurs triphasés, comme :
A) Le redresseur en étoile à simple alternance;
B) Le redresseur en pont.
A) Le redresseur triphasé à simple alternance
Le redresseur triphasé en montage étoile, représentée à la Figure 4, comprend un
transformateur triphasé dont les enroulements primaires sont branchés en triangle et les
enroulements secondaires sont branchés en étoile. Une diode est placée sur chaque phase et la
charge résistive est branchée entre le point commun des cathodes des diodes D1, D2, D3 et le
point neutre. Chaque diode conduit sur un intervalle de 120°. Elle laisse passer le courant
dans l’intervalle de temps où la tension de sa phase est supérieure aux deux autres (Figure
5).
Le courant moyen dans chaque diode équivaut au tiers du courant de charge et la
fréquence du signal de sortie est égale à trois fois le signal d’entrée.
Ce redresseur est employé que pour des montages industriels de petites puissances.
FIGURE 4 REDRESSEUR TRIPHASÉ SIMPLE ALTERNANCE
FIGURE 5 FORME D’ONDE D’UN REDRESSEUR TRIPHASÉ SIMPLE ALTERNANCE
Valeurs caractéristiques des tensions et courants:
La valeur moyenne de tension à la charge est donnée par l’équation 2.3 :
B) Le redresseur triphasé en pont
Le redresseur triphasé en pont (Figure 6) est un des circuits redresseurs industriels
les plus efficaces, il peut être considéré comme redresseur simple alternance à anode
commune et cathode commune montés en « tête-bêche ».
FIGURE 6 REDRESSEUR TRIPHASÉ EN PONT
Considérons la représentation graphique des tensions triphasés d’alimentation (Figure
7). Quand la tension de phase e1est supérieure aux tensions e2et e3, la diode D1 conduit,
et les diodes D2 et D3 sont à l’état bloqué. De même la diode D6 conduit, et les diodes D5 et
D6 sont bloquées.
Le même raisonnement s’applique lorsque la tension e2est supérieure aux deux (2) autres.
Chaque diode conduit pendant un intervalle de 120°. À titre d’exemple, la diode D1 conduit
60°avec D4 et 60°avec D5. Le courant moyen dans chaque diode est égale au tiers du
courant de charge. La fréquence du signal à la sortie équivaut à six fois la fréquence
d’entrée.
Une bobine peut être rajoutée en série avec la charge pour diminuer le taux d’ondulation.
FIGURE 7 FORME D’ONDE D’UN REDRESSEUR TRIPHASÉ EN PONT
Valeurs caractéristiques des tensions et des courants:
La valeur moyenne de tension à la charge est donnée par l’équation 2.4 :
Vo moy = 1,65 E max (2.4)
E : tension de phase
2. Le redresseur à tension variable en commutation contrôlée à base de thyristors
(redresseur commandé)
Les redresseurs commandés permettent de contrôler la tension moyenne à la charge.
On les utilise surtout dans la commande des moteurs à courant continu pour varier la vitesse.
On retrouve les redresseurs commandés à simple et double alternance pour des tensions
monophasées et triphasées.
2.1. Le redresseur commandé monophasé
A) Le redresseur commandé monophasé à simple alternance
Pour varier la tension moyenne à la charge, on utilise un thyristor qui est déclenché à
partir d’un circuit de commande synchronisé sur le secteur (Figure 8). On utilise en général
la commande par rampe synchrone.
FIGURE 8 REDRESEUR COMMANDÉ SIMPLE ALTERNANCE
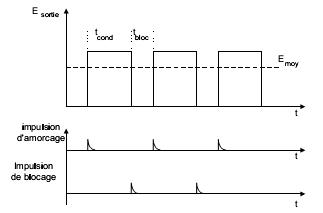
En l’absence de signal sur la gachette, le thyristor est à l’état bloqué. Si l’on applique une impulsion
sur la gachette durant le cycle positif, le thyristor conduit.Il bloque lorsque la tension passe à zéro
et durant le cycle négatif .
Tension moyenne à la charge
La valeur moyenne de tension est donnée par l’équation 2.5 :
B) Le redresseur monophasé en pont semi-commandé
Dans le cas du redresseur en pont mixte avec deux thyristors et deux diodes
(Figure 9), les deux alternances sont contrôlées et le circuit nécessite des signaux de gachette
déphasés de 180°. On utilise un transformateur d’impulsion avec deux secondaires pour
réaliser l’amorçage.
La diode D5 est utilisée pour assurer le blocage des thyristors dans le cas d’une charge
fortement inductive (moteur électrique). Cette diode est aussi appelée (diode de roue libre.
FIGURE 9 REDRESSEUR EN PONT SEMI-COMMANDÉ
Tension moyenne à la charge:
La valeur de tension à la charge est donnée par l’équation 2.6 :
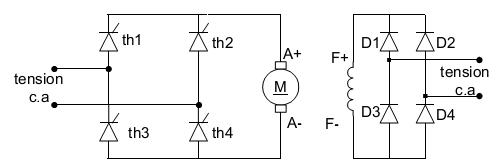
C) Le redresseur monophasé en pont complètement commandé
On peut réaliser un redresseur en pont enutilisant quatre thyristors (Figure 10). Ce
circuit nécessite l’utilisation de deux transformateurs d’impulsions avec chacun, deux
enroulements au secondaire.
À l’aide de ce redresseur, il est possible de fournir de l’énergie au réseau par l’intermédiaire du transformateur, à condition que l’angle d’amorçage soit supérieur à 90°et que la charge soit
fortement inductive comme dans le cas d’un moteur à courant continu en période de freinage.
FIGURE 10 REDRESSEUR EN PONT COMPLETEMENT COMMANDE
2.2. Le redresseur commandé triphasé
A) Redresseur commandé triphasé à simple alternance
Ce type de montage correspond à trois circuits redresseurs commandés monophasés à
simple alternance qui fontionnent les uns après les autres (Figure 11).
Le circuit de commande du redresseur doit envoyer, sur la gachette des thyristors des
impulsions décalés de 120°.
FIGURE 11 REDRESSEUR COMMANDÉ TRIPHASÉ À SIMPLE ALTERNANCE
Tension moyenne à la charge:
Lorsque l’angle d’amorçage est compris entre 0
°
et 30°, la tension à la charge n’est pas
interrompue. La tension moyenne à la charge est donnée par l’équation 2.7 :
Quand l’angle d’amorçage devient supérieur à 30°, la valeur moyenne est donnée par
l’équation 2.8 :
Dans le cas d’une charge fortement inductive, le circuit peut agir comme redresseur (Figure
12) pour un angle situé entre 0°et 90°, et comme onduleur (générateur )pour un angle au
dessus de 90°. Dans ce cas-ci, le circuit fournit de l’énergie au réseau (Figure 13).
Ce fonctionnement est utilisé en traction électrique lors du freinage des trains ;durant la
période de freinage , les moteurs à courant continu deviennent temporairement des
génératrices.
B) Redresseur triphasé en pont complètement commandé
Le redresseur en pont de la Figure 14 est constitué de six thyristors qui sont
déclenchés à tour de rôle. On observe (Figure 15) que le thyristor Th1 est amorcé quand la
phase e1est durant la période maximum; ensuite ,c’est au tour de Th2 d’être amorcé 60°plus
tard. Le même scénario se répète avec les thyristors Th3 et Th4. Dans le cas de charge inductive
(moteur à courant continu, on branche une diode de roue libre en parallèle avec la charge.
Ce circuit est plus utilisé en industrie que le circuit précédent car il offre un meilleur
rendement
FIGURE 14 REDRESSEUR TRIPHASÉ EN PONT COMPLETEMENT COMMANDE
FIGURE 15 FORME D’ONDE POUR UN REDRESSEUR TRIPHASÉ EN PONT COMPLETEMENT COMMANDE
Tension moyenne à la charge
La tension moyenne à la charge est donnée par l’équation 2.9 :