Ce dispositif ( Figure 1) permet de convertir une tension alternative à fréquence
fixe en une tension alternative à tension variable (gradateur) ou à fréquence variable
(cycloconvertisseur).

FIGURE 1 CONVERTISSEUR ALTERNATIF-ALTERNATIF
1. Le gradateur
Un gradateur est un dispositif qui permet de contrôler la puissance alternative fournie
à des charges résistives (fours électriques, système d’éclairage et des charges inductives
(moteur universel, moteurs asynchrones,etc.)
Ce convertisseur est réalisé à partir de triacs pour des charges de faible puissance ou
des thyristors pour des charges plus élevées. On le retrouve pour des alimentations
monophasées et triphasées.
1.1. Le gradateur monophasé
En utilisant deux thyristors montés en parallèle inverse, nous pouvons contrôler la
puissance dans une charge résistive de zéro à sapleine puissance (Figure 2). Pour obtenir
des angles d’amorçage égaux , il faut appliquer à chaque thyristor des signaux de gachette
isolés et déphasés de 180°. Le sigal de commande peut varier de 0°à 180°.

FIGURE 2 GRADATEUR MONOPHASÉ
La valeur efficace de la tension aux bornes d’une charge résistive est donnée par l’équation

α: angle d’amorçage compris entre 0°et 180°
Exemple
Un gradateur monophasé est alimenté par une source de 220 volts à 50hz. Calculez la tension
efficace et la puissance débitée dans une charge de 10Ω, pour un angle de 90°.
Solution

Le gradateur triphasé est constitué de trois groupes de deux thiristors montés en
parallèle-inverse (Figure 3). Ces groupes de thyristors peuvent alimenter des charges
branchées en étoile ou en triangle. Pour permettre au courant de circuler dans les charges,
deux thyristors doivent-être simultanément à l’état passant soit : Th1 avec Th5 ou Th3 avec
Th2. Afin d’avoir un bon fonctionnement, chaque thyristor doit recevoir une deuxième
impulsion déphasée de 60°après la première impulsion. Les formes d’ondes pour un signal
d’amorçage de 100°sont illustrées à la Figure 4.

FIGURE 3

FIGURE 4 FORME D’ONDE POUR UN GRADATEUR TRIPHASÉ
1.3. Application des gradateurs
On retrouve des gradateurs pour les systèmesà vitesse variable dans des installations
telles que les engins de levage où le rendement n’est pas une contrainte, étant donné la
fréquence et la durée de leur utilisation.
Notons que le démarrage se fait facilement à tension croissante et n’entraîne donc pas
de surintensité dans le moteur. Cette propriété des gradateurs est aussi utilisée dans des
systèmes de démarrage et de freinage de moteurs de grande puissance (>30kw).On le
retrouve dans l’industrie sous le nom de démarreur ralentisseur ou <softstart>tel que
l’Altistart de la compagnie Télémécanique .
On utilise aussi les gradateurs pour l’alimentation des moteurs monophasés universels
qu’on utilise dans plusieurs appareils ménagers ou de bricolage à vitesse variable.
2. Le cycloconvertisseur
Le cycloconvertisseur est un système de conversion statique qui, à partir d’un réseau
alternatif d’une fréquence donnée, fournit à une charge du courant alternatif à une fréquence
plus basse et variable. On retrouve des cyclovonertisseurs monophasés et triphasés.
Le principe de fonctionnement est expliquéà partir du montage de la Figure 5. Le
cycloconvertisseur est constitué par six thyristors montés en parallèle inverse et alimentés par
un transformateur à prise médiane. Les thyristors Th1 et Th3 forment le groupe convertisseur
positif alors que Th2 et Th4 constituent le groupe négatif.
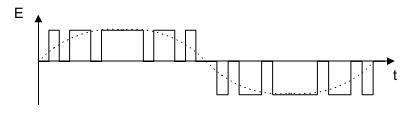
Les thyristors Th1 et Th3 sont amorcés à chaque alternance, pour un total de septs
impulsions (Figure 6). Par la suite, les thyristors Th2 et Th4 du groupe négatif sont amorcés
le même nombre de fois et avec le même retard. La tension de sortie est ainsi formée de la
juxtaposition de fractions de sinusoïdes successives qui proviennent de la tension d’entrée.
La fréquence de la tension à la charge est égale à 1/7 de la fréquence d’entrée. Le même principe
de fonctionnement s’applique pour les cycloconvertisseurs triphasés.

FIGURE 5 CYCLOCONVERTISSEUR MONOPHASÉ

FIGURE 6 FORME D’ONDE D’UN CYCLOCONVERTISEUR MONOPHASÉ
On retrouve les cycloconvertisseurs comme variateurs de vitesse pour les moteurs
synchrones et asynchrones de forte puisance (de 1,5Mw et plus) et tournant à des vitesses très
lentes. Les fréquences utilisées se situent entre 0HZ et 20HZ.
Citons, à titre d’exemple, les moteurs des machines d’extraction minière, les moteurs
d’entraînement des broyeurs à ciment, les moteurs à propultion de navires, etc.






































{kind=link}