1.1. Problèmes industriels
Les moteurs asynchrones triphasés, spécialement les moteurs à cage, sont les
moteurs électriques les plus répandus dansl’industrie; il est donc essentiel de
développer les principaux problèmesposés par leur utilisation.
Les performances d’un moteur concernent les domaines suivants : démarrage,
variation de la vitesse, freinage et inversion du sens de marche. Si l’on compare le
moteur asynchrone au moteur shunt à courant continu, on constate que les
caractéristiques mécaniques, dans leur parties stables, sont identiques, ce qui
conduit aux mêmes applications industrielles.En ce qui concerne le choix d’un
moteur pour une application donnée, il est intéressant de signaler les avantages et
les inconvénients de ces deux moteurs.
1.2.1. Avantages du moteur asynchrone
Comparé au moteur shunt, le moteur asynchrone a l’avantage d’être alimenté
directement par le réseau triphasé. Son prix d’achat est moins élevé. Il est beaucoup
plus robuste car il ne nécessite pratiquement pas d’entretien.Ses deux qualités
fondamentales (prix et solidité)résultent du fait qu’il n’a pas de collecteur. En effet, le
collecteur est un organe coûteux et fragilequi nécessite un entretien fréquent :
changement des balais.
1.2.2. Inconvénients du moteur asynchrone
A l’exception du démarrage et de l’inversion du sens de marche, que l’on peut
résoudre de façon satisfaisante, le moteur asynchrone a des performances très
médiocres par rapport à celles du moteur shunt.
En effet jusqu’à ces dernières années, l’entraînement idéal était réalisé par le groupe
Léonardformé d’un moteur shunt alimenté parun convertisseur de tension. Le
convertisseur Léonard, en raison des trois machines qu’il comporte est un
équipement coûteux qui ne peutconvenir que pour de grandes
puissances (laminoirs). C’est pourquoi, pour des puissances moyennes, on a
longtemps utilisé des moteurs triphasés à collecteur (moteurs shunt et série). Ces
moteurs, qui ont des propriétés voisines de celles des machines à courant continu,
ont l’avantage de fonctionner directement sur lesecteur mais ils sont aussi coûteux
et fragiles, en raison de leur collecteur, ainsi sont-ils de plus en plus abandonnés.
De nos jours, grâce aux progrès de l’électronique, on arrive à rendre les moteurs
asynchrones aussi performants que les moteurs à collecteurs. Par ailleurs, si l’on
compare les deux types de moteurs asynchrones (à bagues et à cage), il est évident
que le moteur à bagues a plus de possibilités, car on peut l’alimenter aussi bien par
son stator que par son rotor. Malgré cet avantage indiscutable, c’est le moteur à
cage, en raison de sa très grande robustesse, qui est de plus en plus utilisé.
1.2.3. Problèmes de démarrage
Le problème du démarrage comporte deux aspects :
- Courant appelé
Lorsque le stator est mis sous tension, le rotor est à l’arrêt (n= 0 ⇒ g= 1) : le
moteur se comporte exactement comme un transformateur triphasé en court-circuit
(les courants rotoriques ont la même fréquence fque les grandeurs statoriques). La
valeur efficace Iddes courants appelés dans la ligneest alors très supérieure au
courant nominal In(fig. 1). Idest le courant de décollage(ou de démarrage); le
rapport Id/ In, appelé pointe de courant, est souvent compris entre 4 et 10.

Dès que le moteur se met à tourner, le courant appelé diminue rapidement. En fait,
pendant le démarrage le courantreste supérieur à sa valeur nominale que très peu
de temps. Le moteur est généralement capable de le supporter sans échauffement
dangereux. Cependant il en résulte, dans la ligne alimentant le moteur, une chute de
tension qui, malgré sa brièveté, est inacceptable pour les autres usagers branchés
sur la même ligne.
Le distributeur de l’énergie électrique impose au rapport Id/ Inune limite à ne pas
dépasser de l’ordre de 2 à 3.
- Couple exercé
Pour que le groupe, moteur asynchrone + machine entraînée, démarre il faut que le
couple électromagnétique Tdau décollage soit supérieurau couple résistant Tr
correspondant à n= 0.
S’il en est ainsi le groupe voit sa fréquence de rotation ncroître jusqu’à une limite,
l’abscisse n1du point d’intersection de la caractéristique n = f(T)du moteur et de la
caractéristique n = f(Tr)de la machine entraînée (fig. 2).

Lorsque na atteint cette limite, le démarrage est terminé : c’est le régime permanent
puisque le couple moteur Test exactement équilibré par le couple résistant Tr.
Au cours de démarrage gpasse progressivement de 1 à une valeur voisine de zéro
(par exemple g= 0,05); les pertes rotoriques, proportionnelles à g, sont très
supérieures, pendant toute la durée du démarrage, à leur valeur en marche nominale
(où g ≈0); pour que l’échauffementdu moteur ne soit pas excessif, il faut que le
temps de démarragesoit aussi courtque possible.
1.2.4. Freinage par électro – frein
Un électro - frein, du type serré au repos, équipe beaucoup de moteurs asynchrones
triphasés, désignés alors par les constructeurs “MOTEURS - FREINS”.
C’est le mode de freinage de sécurité capable d’assurer le blocage à l’arrêt, même
en l’absence de courant. Le couple de freinage (fig. 3) est proportionnel à la
force F, appliquée par l’intermédiaire d’un ressort au plateau en appui sur le disque
tournant, et au rayon moyen Rmainsi qu’au coefficient de frottement k; celui-ci
dépend de la garniture interposée (5).

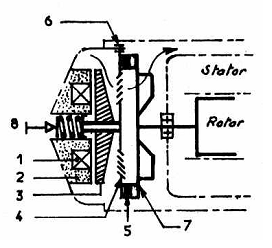
- Electro - frein à courant continu fig. 4
La bobine 1est alimentée en courant redressé double - alternance. L’armature 3
vient coller à la culasse 2, entraînant avec elle le plateau 4. Le disque ventilateur 7et
le rotor sont alors libérés. Trois guidages 6assurent un positionnement “flottant” du
plateau et interdisent sa rotation. Un dispositif 8permet un réglage de Fet donc du
couple de freinage.
L’alimentation du redresseur, bi-valve ou pont, peut être réalisée par des prises sur
l’enroulement stator. Un électro - frein série (EF1) doit être établi pour l’intensité
nominale du moteur; la pointe d’intensité de démarrage facilite le desserrage.

Les enroulements EF3sont comparables à ceux d’un stator mis à plat et sont à six
sorties pour autoriser aussi le couplage Υou ∆suivant la tension du réseau.
Le disque 9est ici serré entre les couronnes 4et 10.


Les moteurs asynchrones triphasés, spécialement les moteurs à cage, sont les
moteurs électriques les plus répandus dansl’industrie; il est donc essentiel de
développer les principaux problèmesposés par leur utilisation.
Les performances d’un moteur concernent les domaines suivants : démarrage,
variation de la vitesse, freinage et inversion du sens de marche. Si l’on compare le
moteur asynchrone au moteur shunt à courant continu, on constate que les
caractéristiques mécaniques, dans leur parties stables, sont identiques, ce qui
conduit aux mêmes applications industrielles.En ce qui concerne le choix d’un
moteur pour une application donnée, il est intéressant de signaler les avantages et
les inconvénients de ces deux moteurs.
1.2.1. Avantages du moteur asynchrone
Comparé au moteur shunt, le moteur asynchrone a l’avantage d’être alimenté
directement par le réseau triphasé. Son prix d’achat est moins élevé. Il est beaucoup
plus robuste car il ne nécessite pratiquement pas d’entretien.Ses deux qualités
fondamentales (prix et solidité)résultent du fait qu’il n’a pas de collecteur. En effet, le
collecteur est un organe coûteux et fragilequi nécessite un entretien fréquent :
changement des balais.
1.2.2. Inconvénients du moteur asynchrone
A l’exception du démarrage et de l’inversion du sens de marche, que l’on peut
résoudre de façon satisfaisante, le moteur asynchrone a des performances très
médiocres par rapport à celles du moteur shunt.
En effet jusqu’à ces dernières années, l’entraînement idéal était réalisé par le groupe
Léonardformé d’un moteur shunt alimenté parun convertisseur de tension. Le
convertisseur Léonard, en raison des trois machines qu’il comporte est un
équipement coûteux qui ne peutconvenir que pour de grandes
puissances (laminoirs). C’est pourquoi, pour des puissances moyennes, on a
longtemps utilisé des moteurs triphasés à collecteur (moteurs shunt et série). Ces
moteurs, qui ont des propriétés voisines de celles des machines à courant continu,
ont l’avantage de fonctionner directement sur lesecteur mais ils sont aussi coûteux
et fragiles, en raison de leur collecteur, ainsi sont-ils de plus en plus abandonnés.
De nos jours, grâce aux progrès de l’électronique, on arrive à rendre les moteurs
asynchrones aussi performants que les moteurs à collecteurs. Par ailleurs, si l’on
compare les deux types de moteurs asynchrones (à bagues et à cage), il est évident
que le moteur à bagues a plus de possibilités, car on peut l’alimenter aussi bien par
son stator que par son rotor. Malgré cet avantage indiscutable, c’est le moteur à
cage, en raison de sa très grande robustesse, qui est de plus en plus utilisé.
1.2.3. Problèmes de démarrage
Le problème du démarrage comporte deux aspects :
- Courant appelé
Lorsque le stator est mis sous tension, le rotor est à l’arrêt (n= 0 ⇒ g= 1) : le
moteur se comporte exactement comme un transformateur triphasé en court-circuit
(les courants rotoriques ont la même fréquence fque les grandeurs statoriques). La
valeur efficace Iddes courants appelés dans la ligneest alors très supérieure au
courant nominal In(fig. 1). Idest le courant de décollage(ou de démarrage); le
rapport Id/ In, appelé pointe de courant, est souvent compris entre 4 et 10.

Courant de démarrage
Fig. 1
Fig. 1
Dès que le moteur se met à tourner, le courant appelé diminue rapidement. En fait,
pendant le démarrage le courantreste supérieur à sa valeur nominale que très peu
de temps. Le moteur est généralement capable de le supporter sans échauffement
dangereux. Cependant il en résulte, dans la ligne alimentant le moteur, une chute de
tension qui, malgré sa brièveté, est inacceptable pour les autres usagers branchés
sur la même ligne.
Le distributeur de l’énergie électrique impose au rapport Id/ Inune limite à ne pas
dépasser de l’ordre de 2 à 3.
- Couple exercé
Pour que le groupe, moteur asynchrone + machine entraînée, démarre il faut que le
couple électromagnétique Tdau décollage soit supérieurau couple résistant Tr
correspondant à n= 0.
S’il en est ainsi le groupe voit sa fréquence de rotation ncroître jusqu’à une limite,
l’abscisse n1du point d’intersection de la caractéristique n = f(T)du moteur et de la
caractéristique n = f(Tr)de la machine entraînée (fig. 2).

Couple de démarrage
Fig. 2
Fig. 2
Lorsque na atteint cette limite, le démarrage est terminé : c’est le régime permanent
puisque le couple moteur Test exactement équilibré par le couple résistant Tr.
Au cours de démarrage gpasse progressivement de 1 à une valeur voisine de zéro
(par exemple g= 0,05); les pertes rotoriques, proportionnelles à g, sont très
supérieures, pendant toute la durée du démarrage, à leur valeur en marche nominale
(où g ≈0); pour que l’échauffementdu moteur ne soit pas excessif, il faut que le
temps de démarragesoit aussi courtque possible.
1.2.4. Freinage par électro – frein
Un électro - frein, du type serré au repos, équipe beaucoup de moteurs asynchrones
triphasés, désignés alors par les constructeurs “MOTEURS - FREINS”.
C’est le mode de freinage de sécurité capable d’assurer le blocage à l’arrêt, même
en l’absence de courant. Le couple de freinage (fig. 3) est proportionnel à la
force F, appliquée par l’intermédiaire d’un ressort au plateau en appui sur le disque
tournant, et au rayon moyen Rmainsi qu’au coefficient de frottement k; celui-ci
dépend de la garniture interposée (5).

Principe de freinage Fig. 3
- Electro - frein à courant continu fig. 4
La bobine 1est alimentée en courant redressé double - alternance. L’armature 3
vient coller à la culasse 2, entraînant avec elle le plateau 4. Le disque ventilateur 7et
le rotor sont alors libérés. Trois guidages 6assurent un positionnement “flottant” du
plateau et interdisent sa rotation. Un dispositif 8permet un réglage de Fet donc du
couple de freinage.
L’alimentation du redresseur, bi-valve ou pont, peut être réalisée par des prises sur
l’enroulement stator. Un électro - frein série (EF1) doit être établi pour l’intensité
nominale du moteur; la pointe d’intensité de démarrage facilite le desserrage.


Electro – frein à courant continu
Fig. 4
Fig. 4
- Electro - frein à courants triphasés (fig. 5)
Les enroulements EF3sont comparables à ceux d’un stator mis à plat et sont à six
sorties pour autoriser aussi le couplage Υou ∆suivant la tension du réseau.
Le disque 9est ici serré entre les couronnes 4et 10.


Electro – frein à courant triphasé
Fig. 5
Fig. 5
Aucun commentaire:
Enregistrer un commentaire