Deux grandes familles du modèles théoriques sont à la base de la conception des nombreux équipements de force électromotrice:
- les lois d'électrotechnique qui définissent le fonctionnement des différents moteurs,
- les lois d'électronique qui déterminent les grandeurs caractéristiques de la commutation électronique de puissance parsemi-conducteurs. Compte-tenu de l'importance de son domaine d'application cette partie fait objet d'une étude détaillée dans un module à part.
La partie des travaux pratiques proposés doit rendre les stagiaires capables:
- de comprendre les lois et les concepts associés aux différents schémas,
- d'exploiter une nomenclature,
- d'identifier dans un équipement le type de démarrage utilisé,
- de justifier un type de démarrage par rapport au couple résistant de la machine entraînée,
- de concevoir un équipement complexepar association d'équipements élémentaires,
- de proposer une méthode logique d'intervention dans une phase d'entretien ou de dépannage,
- de se préparer à comprendre l'évolution technique de ces équipements en fonction du développement de l'électronique de puissance.
La conception de tout équipement doit prendre en compte les données du Cahier des charges qui précise:
- les caractéristiques de grandeur et de forme du couple résistant TR de la machine entraînée,
- les conditions d'exploitation de l'ensemble "équipement - moteur - machine",
- les caractéristiques du réseau de distribution de l'énergie électrique.
Les caractéristiques mécaniques couple résistanten fonction de la vitesse de rotation, TR= f (n), des machines entraînées sontbien représentatives de leurs conditions de fonctionnement. On distingue trois types principaux:
- Caractéristique d'allure parabolique (fig. -1a): ventilateur, pompe centrifuge à vide),
- Caractéristique à couple résistant constant (fig.-1b): engins de levage,
- Caractéristique d'allure hyperbolique (fig. -1c): essoreuse, concasseur.

Principaux types de caractéristiques mécaniques
Fig. -1
Fig. -1
Le processus de mise en service d'une machine met en évidence deux types de phases:
- Les phases stables: fonctionnement en régime nominal et arrêt.
- Les phases transitoires: démarrage, freinage, changement de sens de rotation, changement ou variation de vitesse.
Exception faite de la phase de freinage qui conduit à l'arrêt, dans toutes les phases transitoires, le couple moteur, TM, doit être supérieur en valeur absolue au couple résistant, TR(fig. -2).

Mise en fonctionnement d'une machine
Fig. -2
Fig. -2
Le point Pparticulier, pour lequel TM= TR, définit le point d'équilibre ou de fonctionnement de l'ensemble "moteur - machine". A ce point de fonctionnement Pcorrespondent le couple nominal Tnet la vitesse nominale nn.
Les conditions caractéristiques du milieu ambiant: atmosphère (humidité, corrosion, explosion, poussières, etc.), température, chocs mécaniques, guident le choix du
moteur vers les différents types proposés par les constructeurs: moteurs protégés, moteurs étanches, moteurs antidéflagrants, moteurs tropicalisés, etc.
Les contraintes du réseau d'énergie électrique, essentiellement d'ordre énergétique, comme nature du courant (continu ou alternatif), type de distribution (monophasé, triphasé trois ou quatre fils), grandeur de la tension,limite de l'intensité en ligne, sont imposées à l'utilisateur et doivent être prises en compte dans le choix du moteur.
Dans un équipement de force motrice l'ensemble des circuits et des matériels associés est utilisé pour:
- la commande,
- le contrôle,
- la protection
d'un ou plusieurs récepteurs quisont toujours des MOTEURS. Le branchement du moteur au réseau de distribution peut se réaliser:
- Sans perturbationpour les autres récepteurs et sans détériorationdu moteur: l'équipement de démarrage est dit à DEMARRAGE DIRECT.
- Avec perturbationà la fois pour le réseau et les autres récepteurs ou avecdétériorationdu moteur: l'équipement de force motrice doit assurer le démarrage suivant un procédé qui élimine ou qui réduit dans leurs limites réglementaires ces perturbations et qui évite toute détérioration.
D'une façon générale et quel que soit le type de moteur, les différents PROCEDES DE DEMARRAGE ont pour objectif laREDUCTION DE L'INTENSITE DE DEMARRAGE.
Dans un équipement de démarrage on distingue:
- Le circuit de PUISSANCE,
- Le circuit de COMMANDE,
qui ont des fonctions spécifiques définies par la fig. -3. L'étude de ces deux circuits se traduit par deux schémas explicatifs distincts:
- Le schéma du circuit de puissance,
- Le schéma du circuit de commande.
En ce qui concerne le circuit de commande il est intéressant de constater la présence de deux familles d'informations qui précisent les conditions d'exploitation et les contraintes du réseau d'alimentation. Il s'agit des:
- informations relatives aux différents modes de marche: manuelle, semi-automatique, automatique, un ou plusieurs sens de rotation, qui sont gérées par l'OPERATEUR de la machine,
- informations relatives au déroulementdu cycle qui sont INTERNES ou INTEGREES à l'équipement.

Organisation générale d'un équipement de démarrage
Fig. -3
Fig. -3
Dans un équipement de force motrice l'ensemble des circuits et des matériels associés peut être présenté sous forme câbléeou intégrée, c'est-à-dire la logique des schémas de puissance et de commande est exécutée avec des éléments séparés liés avec des conducteurs (câbles) ou on utilise les circuits intégrés électroniques (démarreurs électroniques, automates programmables).
Les travaux pratiques de ce module sontbasés sur la logique câblée qui reste encore utilisée dans plusieurs domaines de l'industrie. Les démarrages électroniques font partie d'un autre module.
Pour le meilleur déroulement des travaux pratiques il est nécessaire de faire un rappel des différents appareillages.
Montage des contacteurs et des discontacteurs
- Contacteur : Appareil destiné à l'ouverture ou à la fermeture d'un ou plusieurs circuits et dont les éléments mobiles n'ont qu'une position de repos correspondant à l'ouverture des circuits principaux (vocabulaire électrotechnique).
Chaque contacteur tripolaire (fig. -4) possède une bobine plus 3 contacts principaux et un contact auxiliaire ("ouvert" ou "fermé"). L'organe de commande peut être placé à droite ou à gauche par rapport aux contacts.
Il existe aussi des contacteurs tétrapolaires qui ont 4 pôles principaux et pas de contact auxiliaire.

Symbole d'un contacteur tripolaire
Fig. -4
Fig. -4
On est souvent amené à considérer dans les équipements à contacteurs 2 circuits différents: le circuit de puissance et le circuit de commande.
- Discontacteur: Contacteur électromagnétique muni de relais provoquant l'ouverture automatique du contacteur dans des conditions prédéterminées (vocabulaire électrotechnique).
Le relais de protection (fig. -5) comprend un dispositif de déclenchement placé dans le circuit de puissance qui, en cas de surintensité, ouvre un contact placé dans le circuit de commande. Ce contact reste ouvert jusqu'à ce que l'on appuie sur un bouton appelé réarmement.
Relais de protection thermique
Fig. -5
Fig. -5
- Commande en courant alternatif
• Commande d'un contacteur par boutons-poussoirs (Marche - Arrêt)
Dans le schéma développé le symbole K n désigne d'une part la bobine du contacteur et, d'autre part, le contact auxiliaire (d'auto-alimentation, d'auto-maintien) qu'elle commande.
Dans le circuit de commande on peut introduire un deuxième bouton Marche (en déviation) et un deuxième bouton Arrêt (en série) (en traits fins sur le schéma).
• Commande d'un discontacteur par boutons-poussoirs (Marche - Arrêt) Le contact du relais de protection est monté en série. Le contact à fermeture du relais F permet d'alimenter une signalisation . Quand il y a eu disjonction, le voyant s'allume et reste allumé (accrochage).
• Commande d'un discontacteur par boutons-poussoirs (Marche - Marche par A-COUPS - Arrêt)
Pour la commande de certaines machines, le moteur d'entraînement nécessite parfois une marche par à-coups (MAC) pour les réglages.
Le bouton MAC peut être spécial. L'ouverture du circuit doit se faire bien avant la fermeture de l’autre partie. De même, l'ouverture de la deuxième partie doit précéder nettement la fermeture du premier circuit.
- Alimentation du circuit de commande
• Alimentation directe
Le circuit de commande est alimenté directement sur le réseau, soit entre phases, soit entre phase et neutre. La protection est assurée par deux fusibles F1 et F2 qui sont calibrés pour protéger lecircuit de commande contre les courts-circuits, mais doivent laisser passer l'intensité d'appel des contacteurs.
Si l'alimentation est faite entre phase et neutre la protection, la protection dépend du régime de neutre:
- Schéma TT ou TN: fusible F1. F2 peut être supprimé ou remplacé par une barrette.
- Schéma IT: fusibles F1 et F2.
• Alimentation par transformateur
Le primaire du transformateur est protégé pardeux fusibles de type aM calibrés à l'intensité nominale du transformateur, il est alimenté à travers les contacts auxiliaires du sectionneur.
Le transformateur a plusieurs rôles:
- Il permet d'assurer l'isolement des circuits de commande et de puissance.
- Il permet d'alimenter le circuit de commande sous tension réduite.
La protection des personnes est assurée si la tension d'alimentation du circuit de commande est en "très basse tension de sécurité” (TBTS). Cette tension sera choisie lorsqu'il y a des risques de rupture du conducteur de protection (appareils mobiles).
L'emploi de la TBTS est génératrice de panne par mauvais contact, notamment dans les installations importantes, à adopter le 110 ou le 220 V.
Principe de temporisation
Un changement d'état sur l'entrée de l'opérateur se traduit par une action retardée de la sortie (fig. - 6).

Principe de temporisation
Fig. - 6
Le temps t1 se traduit par le retard apporté sur la transposition de l'état 0 à 1 de l'entrée: c'est une temporisation à l'enclenchement (ou au travail).
Le temps t2se traduit par le retard apporté sur latransition de l'état 1à 0 de l'entrée: c'est une temporisation au déclenchement (ou au repos).
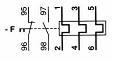
Dans la pratique, les temporisations sont fréquemment des blocs additifs ajoutés sur les relais ou contacteurs et ne possèdent qu'une ou l'autre des deux temporisations (fig. - 7).

a) au travail b) au repos
Contacteur avec auxiliaire temporisé
Fig. - 7
Contacteur avec auxiliaire temporisé
Fig. - 7
On peut également temporiser entièrement un relais ou un contacteur en ajoutant en série avec la bobine un temporisateur électronique. Tous les contacts alors deviennent temporisés.
Aucun commentaire:
Enregistrer un commentaire