1. Diagramme de Behn –Eschenburg
Pour représenter ce diagramme on a deux possibilité :
- soit d’utiliser les conventions d’un générateur (fig. 2-26a). Dans ce cas le diagramme vectoriel est le même que celui d’un alternateur (fig. 2-22).
Toutefois, comme on raisonne en puissance fournie, la puissance fournie est alors négative pour le fonctionnement en moteur.
- soit d’utiliser les conventions d’un récepteur (fig. 2-26b). Dans ce cas on passe du diagramme précédent (fig. 2-22) au nouveau diagramme (fig. 2-26c) en changeant I en – I. Ce nouveau
diagramme , qu’on utilisera pour le fonctionnement en moteur a l’avantage de raisonner en puissance absorbée (la puissance devenant alors négative si la machine fonctionne en alternateur), le rotor est décalé en arrière de l’angle θe par rapport au champ.


2. Fonctionnement
Ici de même le diagramme de Behn – Eschenburg permet de prévoir approximativement le fonctionnement parce que, si le moteur reste couplé au même réseau, l’état de saturation est toujours le même et la réactance X peut être considérée comme constante.
On retrouve les deux régimes de fonctionnement comme pour l’alternateur :
a) à J = Cte (risque de décrochage)
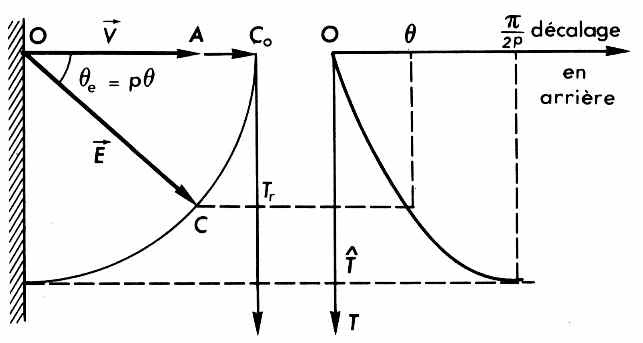
Si le couple résistant Tr exercé sur l’arbre augmente, le rotor se décale de plus en plus en arrière par rapport au champ tournant : l’angle de décalage se fixe à la valeur θ. Dans le diagramme le vecteur E, qui fait avec le vecteur V l’angle θe = pθ, pivote autour du point O (fig. 2-27a) dans le sens négatif.
Si Tr dépasse la valeur de Tmax le décalage θe franchit la valeur π/2p : au-delà, T diminue si bien que le rotor ralentit; il s’écarte de synchronisme.
Le couple moteur moyen s’annule et le rotor s’immobilise : c’est le phénomène de décrochage. Il faut
déconnecter le moteur du réseau triphasé.
La verticale passant par le point O constitue encore la limites des régimes stables : la
stabilité augmente avec Tmax, donc avec J.


La caractéristique mécanique est facile à construire (fig. 2-27c). C’est une droite parallèle à l’axe des couples, puisque la vitesse est invariable. Cette droite est de longueur limitée car le couple ne peut dépasser la valeur des limites stables.
La caractéristique mécanique a l’allure shunt idéale.
b) à P = Cte : courbes en V
Tout ce qui a été vu dans la machine en alternateur est transportable dans la marche en moteur.
Dans le diagramme les horizontales sont des droites d’équipuissance (mais elles sont situées « en dessous » du vecteur V et P est la puissance absorbée par le moteur).
Les courbes I = f(J) ont encore l’allure de V (fig. 2-27b). :
• en sous-excitation ⇒ ϕ > 0 : le moteur est un circuit inductif (courant enarrière de la tension).
• en surexcitation ⇒ ϕ < 0 : le moteur est un circuit capacitif (courant enavant de la tension).
Pour représenter ce diagramme on a deux possibilité :
- soit d’utiliser les conventions d’un générateur (fig. 2-26a). Dans ce cas le diagramme vectoriel est le même que celui d’un alternateur (fig. 2-22).
Toutefois, comme on raisonne en puissance fournie, la puissance fournie est alors négative pour le fonctionnement en moteur.
- soit d’utiliser les conventions d’un récepteur (fig. 2-26b). Dans ce cas on passe du diagramme précédent (fig. 2-22) au nouveau diagramme (fig. 2-26c) en changeant I en – I. Ce nouveau
diagramme , qu’on utilisera pour le fonctionnement en moteur a l’avantage de raisonner en puissance absorbée (la puissance devenant alors négative si la machine fonctionne en alternateur), le rotor est décalé en arrière de l’angle θe par rapport au champ.

Fonctionnement d’une machine synchrone en moteur
Fig. 2-26
Fig. 2-26

Fonctionnement en charge
Fig. 2-22
Fig. 2-22
2. Fonctionnement
Ici de même le diagramme de Behn – Eschenburg permet de prévoir approximativement le fonctionnement parce que, si le moteur reste couplé au même réseau, l’état de saturation est toujours le même et la réactance X peut être considérée comme constante.
On retrouve les deux régimes de fonctionnement comme pour l’alternateur :
a) à J = Cte (risque de décrochage)
Si le couple résistant Tr exercé sur l’arbre augmente, le rotor se décale de plus en plus en arrière par rapport au champ tournant : l’angle de décalage se fixe à la valeur θ. Dans le diagramme le vecteur E, qui fait avec le vecteur V l’angle θe = pθ, pivote autour du point O (fig. 2-27a) dans le sens négatif.
Si Tr dépasse la valeur de Tmax le décalage θe franchit la valeur π/2p : au-delà, T diminue si bien que le rotor ralentit; il s’écarte de synchronisme.
Le couple moteur moyen s’annule et le rotor s’immobilise : c’est le phénomène de décrochage. Il faut
déconnecter le moteur du réseau triphasé.
La verticale passant par le point O constitue encore la limites des régimes stables : la
stabilité augmente avec Tmax, donc avec J.

Courbes de fonctionnement
Fig. 2-27
Fig. 2-27
La caractéristique mécanique est facile à construire (fig. 2-27c). C’est une droite parallèle à l’axe des couples, puisque la vitesse est invariable. Cette droite est de longueur limitée car le couple ne peut dépasser la valeur des limites stables.
La caractéristique mécanique a l’allure shunt idéale.
b) à P = Cte : courbes en V
Tout ce qui a été vu dans la machine en alternateur est transportable dans la marche en moteur.
Dans le diagramme les horizontales sont des droites d’équipuissance (mais elles sont situées « en dessous » du vecteur V et P est la puissance absorbée par le moteur).
Les courbes I = f(J) ont encore l’allure de V (fig. 2-27b). :
• en sous-excitation ⇒ ϕ > 0 : le moteur est un circuit inductif (courant enarrière de la tension).
• en surexcitation ⇒ ϕ < 0 : le moteur est un circuit capacitif (courant enavant de la tension).
Aucun commentaire:
Enregistrer un commentaire